I am a final-year Ph.D. student at University of Toronto, advised by Prof. Florian Shkurti. My research focuses on 3D computer vision, generative models, and robot learning. I am particularly interested in building structured 3D world models for perception, reconstruction, and generation.
I am currently a research intern at NVIDIA, where I work on 3D world modeling for video and geometry.
Opportunities: I will be graduating and seeking full-time research positions starting in Fall 2026. Please feel free to reach out if you see a potential fit!
2021 - Present
University of Toronto
Ph.D. in Computer Science
2026.03 - Present
NVIDIA
Research Scientist Intern
2025.06 - 2026.02
Meta Reality Labs
Research Scientist Intern
2023.08 - 2024.02
Meta Reality Labs
Research Scientist Intern
2019 - 2021
CMU
M.S. in Robotics
2015 - 2019
HKUST
B.Eng. in Elec. Eng. and Comp. Sci.
Selected Publications
* indicates equal contribution.
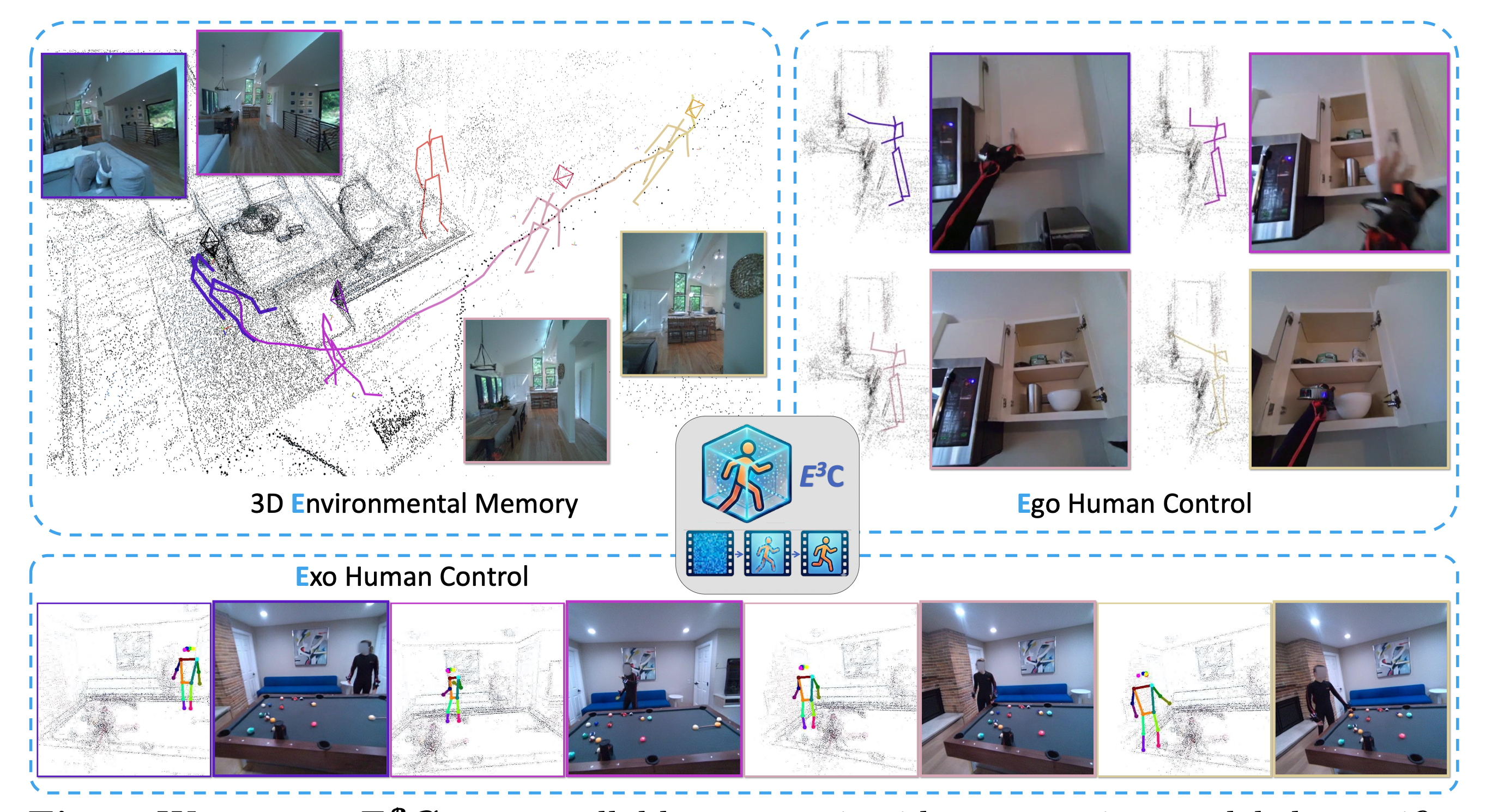
| E³C: Video Generation with 3D Environmental Memory and Ego-Exo Human Pose Control
Qiao Gu, Lingni Ma, Adam W Harley, Richard Newcombe, Florian Shkurti, Julian Straub
Preprint
[project page] [paper] |
| MomaGraph: State-Aware Unified Scene Graphs with Vision-Language Models for Embodied Task Planning
Yuanchen Ju*, Yongyuan Liang*, Yen-Jen Wang*, Gireesh Nandiraju, Yuanliang Ju, Seungjae Lee, Qiao Gu, Elvis Hsieh, Furong Huang, Koushil Sreenath
International Conference on Learning Representations (ICLR), 2026
[project page] [paper] [code] [benchmark] |
| SAFE: Scalable Failure Estimation for Vision-Language-Action Models
Qiao Gu, Yuanliang Ju, Shengxiang Sun, Igor Gilitschenski, Haruki Nishimura, Masha Itkina, Florian Shkurti
Neural Information Processing Systems (NeurIPS), 2025
[paper] [project page] [code] |
| SICNav-Diffusion: Safe and Interactive Crowd Navigation with Diffusion Trajectory Predictions
Sepehr Samavi, Anthony Lem, Fumiaki Sato, Sirui Chen, Qiao Gu, Keijiro Yano, Angela P. Schoellig, Florian Shkurti
Robotics and Automation Letter (RA-L), 2025
[paper] [video] |
| EgoLifter: Open-world 3D Segmentation for Egocentric Perception
Qiao Gu, Zhaoyang Lv, Duncan Frost, Simon Green, Julian Straub, Chris Sweeney
European Conference on Computer Vision (ECCV), 2024
[paper] [video] [project page] |
| ConceptGraphs: Open-Vocabulary 3D Scene Graphs for Perception and Planning
Qiao Gu*, Alihusein Kuwajerwala*, Sacha Morin*, Krishna Murthy Jatavallabhula*, Bipasha Sen, Aditya Agarwal, Corban Rivera, William Paul, Kirsty Ellis, Rama Chellappa, Chuang Gan, Celso Miguel de Melo, Joshua B. Tenenbaum, Antonio Torralba, Florian Shkurti, Liam Paull
International Conference on Robotics and Automation (ICRA), 2024
[paper] [video] [project page] [code] |
| ConceptFusion: Open-set Multimodal 3D Mapping
Krishna Murthy Jatavallabhula, Alihusein Kuwajerwala*, Qiao Gu*, Mohd Omama*, Tao Chen, Shuang Li, Ganesh Iyer, Soroush Saryazdi, Nikhil Keetha, Ayush Tewari, Joshua B. Tenenbaum, Celso Miguel de Melo, Madhava Krishna, Liam Paull, Florian Shkurti, Antonio Torralba
Robotics: Science and Systems (RSS) 2023
[paper] [video] [project page] [code] |
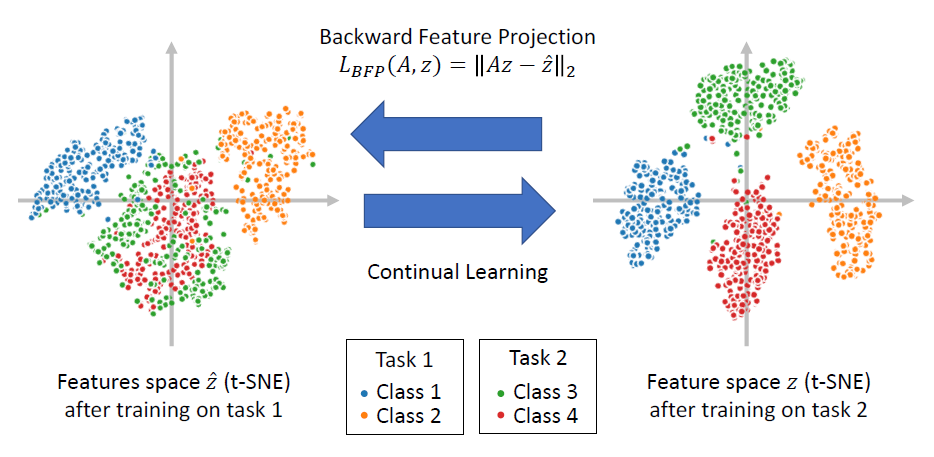
| Preserving Linear Separability in Continual Learning by Backward Feature Projection
Qiao Gu, Dongsub Shim, Florian Shkurti
Computer Vision and Pattern Recognition (CVPR), 2023
[paper] [video] [code] |
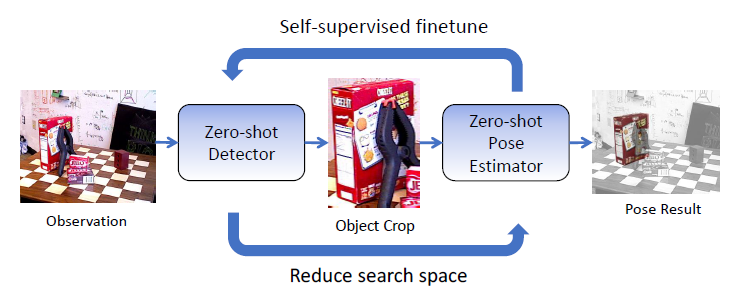
| OSSID: Onilne Self-supervised Instance Detection by (and for) Pose Estimation
Qiao Gu, Brian Okorn, David Held
Robotics and Automation Letter (RA-L), 2022
[paper] [video] [code] [project page] |
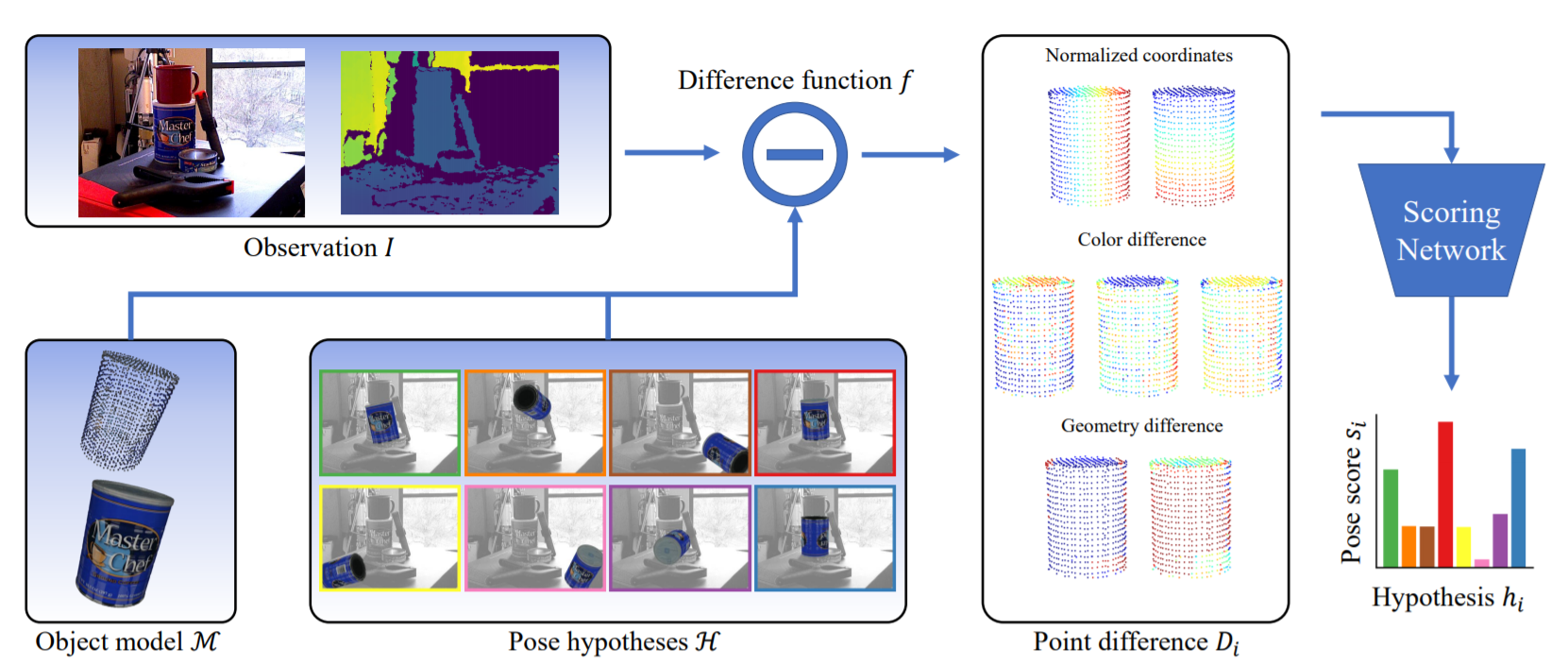
| ZePHyR: Zero-shot Pose Hypothesis Rating
Brian Okorn*, Qiao Gu*, Martial Hebert, David Held
International Conference on Robotics and Automation (ICRA), 2021
[paper] [video] [code] [project page] |
| Deep Video Matting via Spatio-Temporal Alignment and Aggregation
Yanan Sun, Guanzhi Wang*, Qiao Gu*, Chi-Keung Tang, Yu-Wing Tai
Conference on Computer Vision and Pattern Recognition (CVPR), 2021
[paper] [dataset] |
| LADN: Local Adversarial Disentangling Network for Facial Makeup and De-Makeup
Qiao Gu*, Guanzhi Wang*, Mang Tik Chiu, Yu-Wing Tai, Chi-Keung Tang
International Conference on Computer Vision (ICCV), 2019
[paper] [project page] [code] [dataset] |
Teaching
- Teaching Assistant for CSC384 - Intro to Artificial Intelligence, Fall 2022 at UofT
- Teaching Assistant for CSC384 - Intro to Artificial Intelligence, Winter 2022 at UofT
- Teaching Assistant for CSC110 - Foundations of Computer Science I, Fall 2021 at UofT
Service
- Reviwer for T-RO, TPAMI, IJRR, TMLR, RA-L, NeurIPS, CVPR, ICLR, ICCV, ICRA, IROS, ECCV, ICML, WACV
Selected Awards
- Qualcomm Innovation Fellowship Finalist (2025)
- Mary H. Beatty Fellowship (2025-2026)
- Mary H. Beatty Fellowship (2024-2025)
- NeurIPS Top Reviewer (2024)
- Ontario Graduate Scholarship (2022-2023)
- HKUST Academic Achievement Medal (2019)
- HKSAR Government Scholarships (2017-2019)
- Mr. Armin and Mrs. Lillian Kitchell Undergraduate Research Award (2018)
- Dean’s List (2015-2019)