|
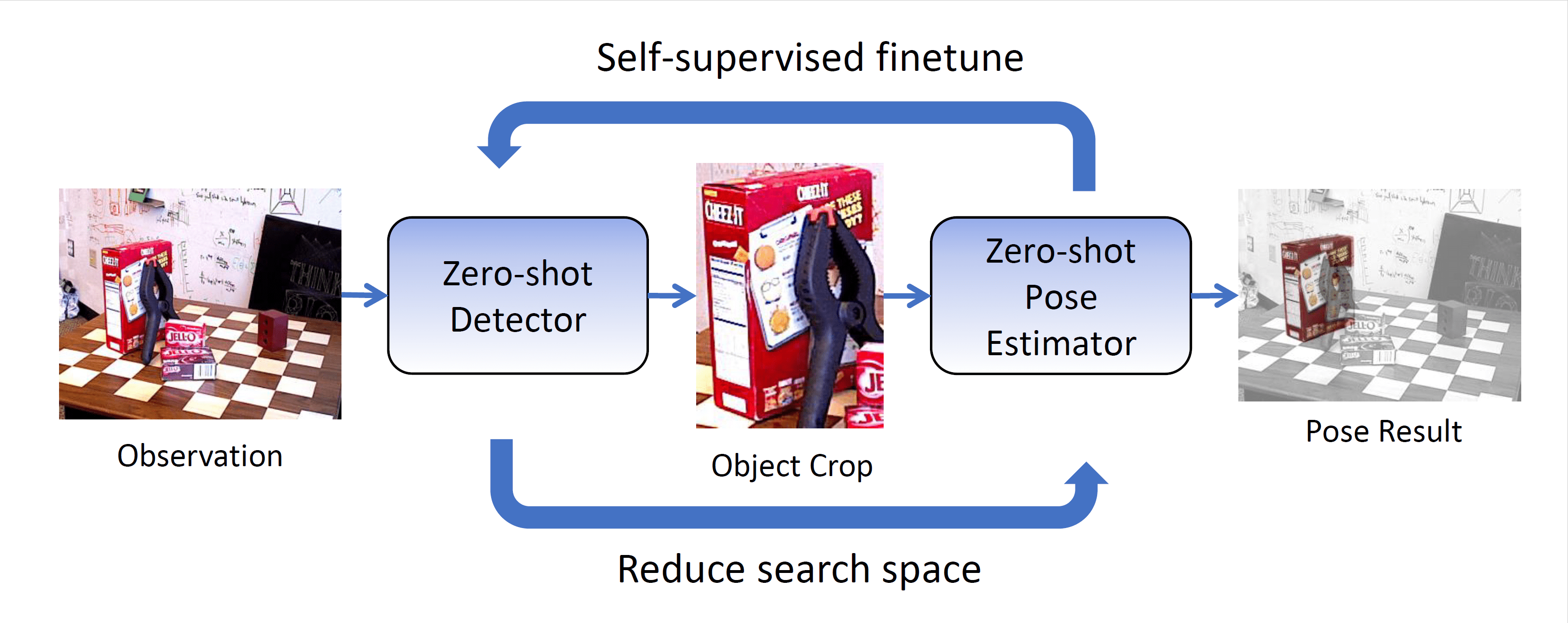
Real-time object pose estimation is necessary for many robot manipulation algorithms. However, state-of-the-art methods for object pose estimation are trained for a specific set of objects; these methods thus need to be retrained to estimate the pose of each new object, often requiring tens of GPU-days of training for optimal performance. In this paper, we propose the OSSID framework, leveraging a slow zero-shot pose estimator to self-supervise the training of a fast detection algorithm. This fast detector can then be used to filter the input to the pose estimator, drastically improving its inference speed. We show that this self-supervised training exceeds the performance of existing zero-shot detection methods on two widely used object pose estimation and detection datasets, without requiring any human annotations. Further, we show that the resulting method for pose estimation has a significantly faster inference speed, due to the ability to filter out large parts of the image. Thus, our method for self-supervised online learning of a detector (trained using pseudo-labels from a slow pose estimator) leads to accurate pose estimation at real-time speeds, without requiring human annotations.
|